
 登錄
登錄
 注冊(cè)
注冊(cè)
RFID世界網(wǎng) >
解決方案 >
交通 >
正文
智慧停車解決方案
摘要:項(xiàng)目概述
智慧停車技術(shù)是多年來(lái)交通技術(shù)發(fā)展的重要方向,近年在互聯(lián)網(wǎng)支付、聯(lián)網(wǎng)道閘等技術(shù)支撐下無(wú)感支付已經(jīng)發(fā)展的
較為突出,進(jìn)出停車場(chǎng)體驗(yàn)已經(jīng)較好。同時(shí)多年來(lái)的車位檢測(cè)和聯(lián)網(wǎng)發(fā)布系統(tǒng)仍然結(jié)構(gòu)復(fù)雜,大量信號(hào)線纜、中繼
和交換機(jī)設(shè)備、信息處理箱等復(fù)雜的硬件和制約了規(guī)?;茝V,有車位監(jiān)測(cè)系統(tǒng)的停車設(shè)置不超過全部停車位的
10%。
我們嘗試使用基于中心基站的LoRaWAN網(wǎng)絡(luò)來(lái)簡(jiǎn)化傳輸,基于電池供電的車位檢測(cè)器簡(jiǎn)化布線。使車位監(jiān)測(cè)只有
傳感器和基站2個(gè)基礎(chǔ)設(shè)施,實(shí)現(xiàn)低成本的大規(guī)模車位監(jiān)測(cè)、違停檢測(cè)、車位誘導(dǎo)、信息發(fā)布平臺(tái),從而實(shí)現(xiàn)基于
云的真正的大規(guī)模車位物聯(lián)網(wǎng)方案。最終實(shí)現(xiàn)停車信息的高度公開和實(shí)時(shí)發(fā)布,違章停車實(shí)時(shí)檢測(cè)實(shí)時(shí)報(bào)警。
網(wǎng)絡(luò)拓?fù)?nbsp;

停車檢測(cè)采用基于電池供電的傳感器,分為地上和地下2種傳感器 檢測(cè)結(jié)果通過LoRaWAN網(wǎng)關(guān)上報(bào)數(shù)據(jù)中心服務(wù)
器 數(shù)據(jù)中心服務(wù)器將結(jié)果發(fā)送到停車計(jì)算平臺(tái)處理 處理結(jié)果可以通過LED誘導(dǎo)、電視墻、LED大屏發(fā)布等渠道進(jìn)行
信息分發(fā)
系統(tǒng)說明
停車檢測(cè)設(shè)備
停車檢測(cè)是車位檢測(cè)基礎(chǔ)設(shè)備,我們分別提供地上車位和地下車位檢測(cè)器來(lái)適應(yīng)不同場(chǎng)景。
地上車位檢測(cè)器GRS-10-L

1. 車輛檢測(cè)器是車位管理系統(tǒng)的重要組成部分,負(fù)責(zé)車位信息的采集和上傳,是停車管理 系統(tǒng)的基石。其準(zhǔn)確
性對(duì)停車系統(tǒng)起著決定性的影響。新一代產(chǎn)品針對(duì)單純磁法檢測(cè)中所無(wú) 法避免的相鄰干擾問題進(jìn)行了突破,
采用多原理的方式和智能綜合算法,使傳感器的準(zhǔn)確性 能有效的提高。
2. 傳統(tǒng)的地磁車位檢測(cè)器利用車輛大塊金屬對(duì)磁場(chǎng)干擾形成的磁場(chǎng)變化來(lái)判定是否有車 輛存在。由于相鄰車
位、周邊電磁都很容易形成磁場(chǎng)干擾,長(zhǎng)期停放車輛也可能對(duì)傳感器有 誤車輛的磁場(chǎng)基數(shù)形成干擾,我們創(chuàng)
新性的使用了多原理傳感器來(lái)進(jìn)行車位探測(cè)?;诖艂?感器、毫米波雷達(dá)的混合探測(cè)技術(shù)極大的提高了車位
監(jiān)測(cè)的可靠性和普適性。 GRS-10-L 的無(wú)線通信部分采用 470M LoRaWAN 協(xié)議進(jìn)行通信。通信協(xié)議為國(guó)際標(biāo)
準(zhǔn) 協(xié)議,通信效率高,電池能量的利用效率高。
3. 傳感器采用脈沖工作方式, 極嚴(yán)格的部件工作時(shí)效控制, 使產(chǎn)品的使用壽命達(dá)到合理的 預(yù)期。產(chǎn)品在各種工
作狀態(tài)下消耗的電流如下,無(wú)線數(shù)據(jù)發(fā)送時(shí)大于 150mA;磁檢工作狀 態(tài)時(shí)小于 20mA,平均小于 10uA;休
眠狀態(tài)小于 1uA;產(chǎn)品采用 19Ah 一次性鋰電池,工作 電壓 3.6v,常態(tài)消耗電流為磁檢測(cè)工作狀態(tài)的平均電
流及 5 分鐘一次的無(wú)線通信電流,由此 可以估算產(chǎn)品的使用壽命為 3-5 年;
該檢測(cè)器安裝在地面車位,每個(gè)車位安裝一套,可準(zhǔn)確檢測(cè)車位狀態(tài)并發(fā)布車位空余信息。
地下車位檢測(cè)器UW68L

依托超聲波探測(cè)傳感器,其自身主動(dòng)發(fā)送脈沖式超聲波信號(hào),通過對(duì)聲波返回的時(shí)間進(jìn)行記錄和判斷, 來(lái)確定被測(cè)
物或障礙物距離檢測(cè)器的距離。 該傳感器的數(shù)據(jù)通過LoRaWAN 協(xié)議上傳至服務(wù)器。 產(chǎn)品的特點(diǎn)有檢測(cè)距離可
調(diào),檢測(cè)準(zhǔn)確度高,功耗低, 使用電池供電。安裝采用磁吸式,或快接安裝,方便快速免布線。
該檢測(cè)器安裝在地下車庫(kù),每車位安裝一套,可準(zhǔn)確檢測(cè)車位狀態(tài)
消防檢測(cè)
在消防監(jiān)測(cè)中,會(huì)存在2種情形,我們提供消防通道、登高面等車位占用監(jiān)測(cè)服務(wù)和樓道堆物監(jiān)測(cè)服務(wù),傳感器對(duì)
應(yīng)上文中的2種。
1. 地面車位檢測(cè)器可以安裝在消防通道和登高面,一般消防通道安裝2個(gè),登高面1個(gè)
2. 地下車位檢測(cè)器的測(cè)距原理可以檢測(cè)是否存在樓道堆物情形,安裝與樓道拐角或者水電表箱,通過距離判斷
是否有堆物隱患
信息發(fā)布
停車計(jì)算平臺(tái)提供多種服務(wù),信息發(fā)布服務(wù)分為3種發(fā)布形式。
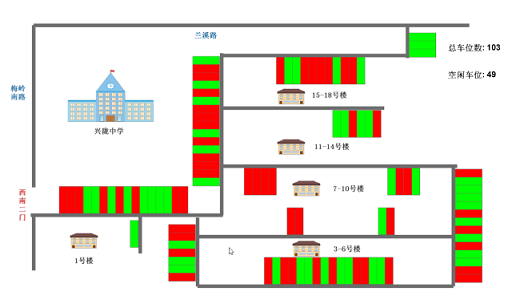
1. 監(jiān)控中心大屏車位地圖服務(wù)
基于小區(qū)地圖的車位和違停發(fā)布信息圖,可以發(fā)布到LCD電視或者拼接屏上。在小區(qū)保安崗?fù)せ蛘呶飿I(yè)監(jiān)控中心實(shí)
時(shí)顯示車位和違停情況

1. 本地部署服務(wù)器和支持1080P的壁掛液晶屏幕
2. 采集小區(qū)車位位置并繪制成完整的車位地圖
3. 車位地圖支持放大、縮小功能
4. 車位地圖支持顯示總車位和空余車位功能
5. 車位地圖根據(jù)車位占用情況支持不同顏色顯示(紅色為車位占用,綠色為車位空閑)
6. 車位地圖支持刷新車位當(dāng)前狀態(tài)
2. 云端車位查詢系統(tǒng) 基于規(guī)模聯(lián)網(wǎng)的多區(qū)域車位實(shí)時(shí)顯示,通過地圖狀態(tài)顯示區(qū)域級(jí)的車位狀態(tài)。
1)車位管理: 支持通過車位注冊(cè)、導(dǎo)入、車位檢測(cè)器編號(hào)新增、修改、維護(hù)功能
2)車位分區(qū):支持分區(qū)將車位分配到不同的LED引導(dǎo)系統(tǒng)中
3)消防車位和登高面:支持消防車位和登高面管理
4)車位狀態(tài)查詢:支持查詢車位是否被占用
5)車位收費(fèi)接口支持:提供了車位分享的車位收費(fèi)規(guī)則接口,可供擴(kuò)展使用
6)車位地圖顯示:支持區(qū)域級(jí)車位地圖顯示

3. 基于LED大屏的車位發(fā)布和信息發(fā)布綜合系統(tǒng)
1)全彩P4 LED屏幕支持視頻、圖片、車位引導(dǎo)、公告信息發(fā)送。支持以下功能
2)支持通過PC或者網(wǎng)頁(yè)系統(tǒng)發(fā)布圖片、公告、視頻(單機(jī)或者網(wǎng)頁(yè)二選一)
3)支持車位引導(dǎo)信息發(fā)布
4)支持實(shí)時(shí)時(shí)間顯示
5)支持動(dòng)態(tài)天氣預(yù)報(bào)顯示
LED信息發(fā)布屏網(wǎng)絡(luò)圖

LED信息發(fā)布實(shí)景圖

4. 基于紅綠雙色聯(lián)網(wǎng)LED信息誘導(dǎo)系統(tǒng)
P6戶外紅綠雙色LED是支持網(wǎng)絡(luò)進(jìn)行群組控制的LED引導(dǎo)專用系統(tǒng),可以安裝在關(guān)鍵路口,至少支持3個(gè)方向的車
位引導(dǎo)提示。
1)支持車位引導(dǎo)數(shù)字顯示
2)最多支持3個(gè)方向的車位引導(dǎo)
3)支持車位裝態(tài)動(dòng)態(tài)刷新

施工工藝

1. 安裝現(xiàn)場(chǎng)需具備的條件
1)安裝現(xiàn)場(chǎng)需要將停車位上車輛移走
GRS-10-L初始化的時(shí)候會(huì)自動(dòng)檢測(cè)周邊磁場(chǎng)并進(jìn)行初始化參數(shù)生成,車位有車會(huì)干擾車位檢測(cè)器
初始化從而增加誤判幾率
2)如果具備條件,應(yīng)當(dāng)將安裝目標(biāo)車位及相鄰的2個(gè)車位車輛全部移走。
2. 安裝打孔工藝技術(shù)

1. 打孔應(yīng)該選擇車位1/3處中心,可以選擇車頭或者車尾打孔
2. 打孔深度為14CM,設(shè)備安裝后應(yīng)與地面齊平,不可低于地面,最低不允許低于地面1CM
3. 如果車位上有下水井蓋、電纜井蓋等大塊金屬會(huì)影響檢測(cè)準(zhǔn)確率,應(yīng)避開1.5米安裝
4. 車位檢測(cè)設(shè)備應(yīng)倒置在孔位30S-1分鐘,在這期間設(shè)備會(huì)檢測(cè)地球磁場(chǎng)并記錄初始狀態(tài),然后迅速正立設(shè)
備放入打好的孔中













